노면 구분 시뮬레이터 ROCLS(Road Classification Simulator)
- 2021년 11월 12일
- 1분 분량
팀명
바닥핥기
팀원 명단
서범규, 박준영, 김민재
지도교수
김영국교수님
작품 배경 및 목적
최근 자동차 시장이 급속도로 변화하는 중이다. 테슬라와 같은 기업들을 필두로 전기차 시장의 규모가 매우 커지고, 소비자는 자동차를 단순한 이동 수단을 넘어선, IT 기술이 접목된 스마트 모빌리티의 역할을 기대하고 있다.
이러한 흐름에 발맞춰 여러 기업에서도 다양한 IT 기술을 차량에 접목하는 시도가 늘어나고 있다. 현대에서는 제네시스 GV80 모델에 카메라 노면 인식과 서스펜션 제어를 결합한 프리뷰 전자제어 서스펜션 기술을 개발하고 있다.
현재의 노면 인식은 자동차에 장착된 카메라를 통하여 이미지를 습득하고, 습득한 이미지를 이용하여 과속방지턱이나 포트홀 등을 탐지하고 판별하는 방식이다. 그러나 이러한 이미지를 통한 판별 방식은 환경 요소로 인해 이미지가 왜곡될 수 있다는 한계점을 가지고 있다.
위의 한계들은 차량의 바퀴에 장착된 진동 센서로부터 데이터를 받아서 주행 중인 노면의 상태를 판별하는 방식을 사용하여 극복할 가능성이 있다. 이러한 가능성을 증명하기 위해서는 실제 상황에서 진동데이터로 노면을 판별하는 테스트를 진행해 볼 필요가 있다.
그러나 이러한 테스트를 실제 자동차에서 바로 진행하기에는 시간과 비용의 문제들이 있다. 따라서, 차량에서 수집한 데이터를 기반으로 테스트의 결과를 효율적으로 모니터링 할 수 있는 시뮬레이팅 및 시각화 시스템이 필요하다.
작품 내용
본 프로젝트의 목적은 자동차 바퀴에 장착된 진동 센서로부터 수집된 데이터를 이용해 분석된 결과를 효율적으로 모니터링 할 수 있는 시뮬레이팅 및 시각화 시스템의 개발을 목표로 한다.
- Frontend 인터페이스 제작
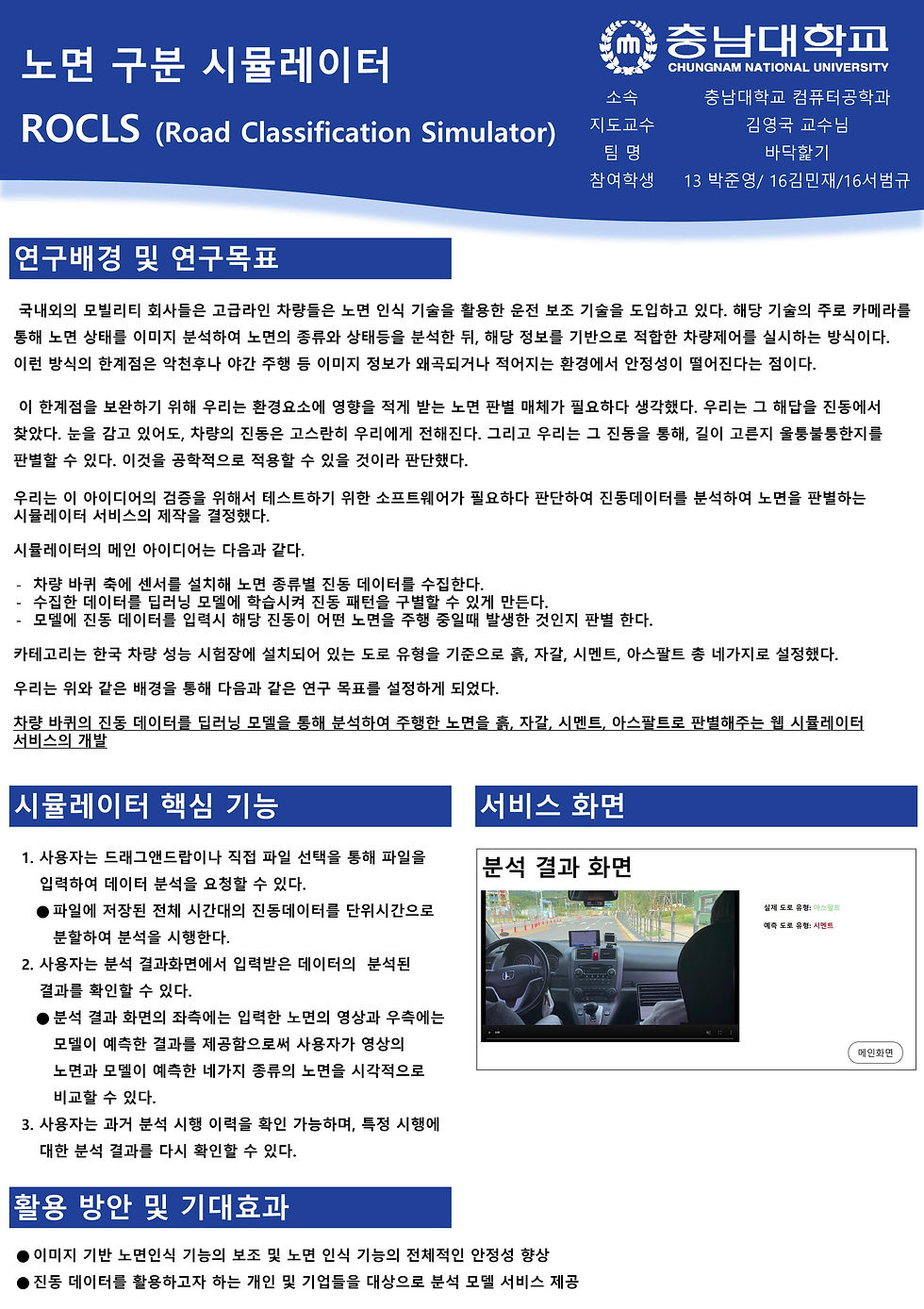
진동데이터와 노면의 상태를 흙길, 자갈길, 아스팔트길, 시멘트길로 분류한 결과를 시각화하여 보여준다.
- Backend API 제작
웹 서비스를 구동하기 위한 서버를 구현한다.
- 데이터베이스 설계
인공지능 모델의 실행 결과를 저장할 수 있도록 데이터베이스를 설계한다.



댓글